Fusion Hybrid Linear Actuator: Concept and Disturbance Resistance Evaluation
力強くも繊細に駆動するアクチュエータは実現できるか?
- 大きな力と高い応答性を両立するハイブリッド駆動をロボットに組み込む際の設計上の課題を解消
- 2つのアクチュエータを融合する「融合型ハイブリッド」という設計コンセプトを確立
- 外乱に対して一定の力を維持する能力が空気圧アクチュエータと比較して高いことを確認
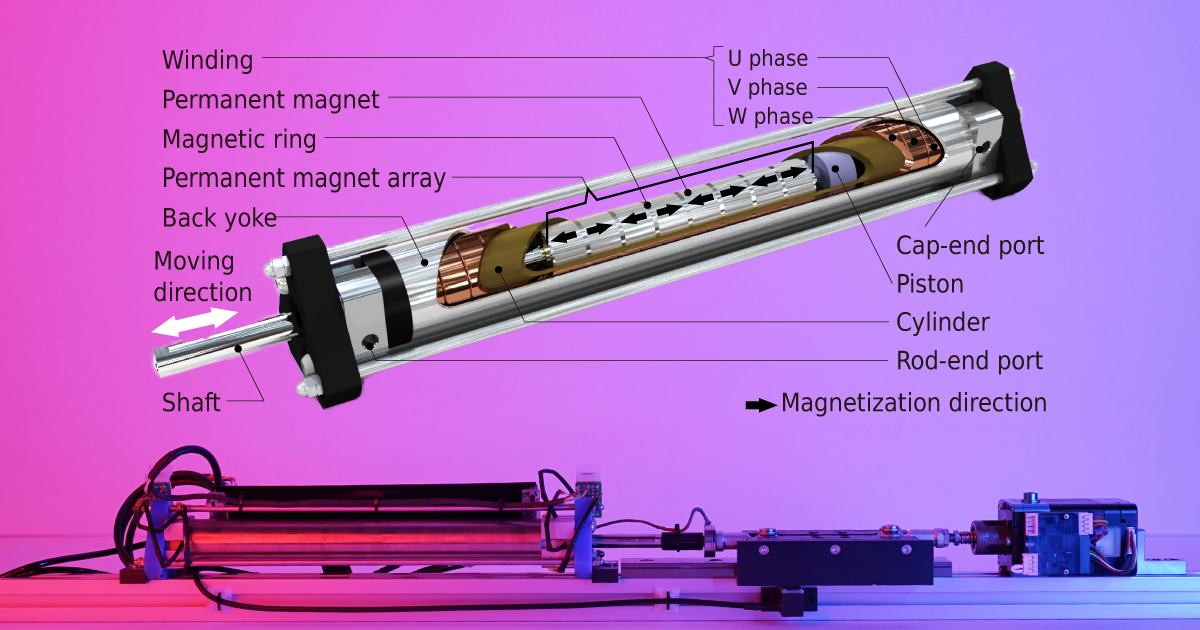
The response of robot actuators to various dynamic interactions during contact tasks is not trivial because there exists a tradeoff between actuator-thrust force density and back-drivability. Although hybrid actuation approaches are promising, complex transmission mechanisms are necessary to synthesize forces from heterogeneous actuators. This study presents a novel concept of a fusion hybrid linear actuator to address the fundamental problems in conventional hybrid actuation approaches. The concept embodies an integrated structure of an air cylinder and a linear motor and shares the moving spaces of the piston and moving part of the linear motor inside the compact housing of the actuator. Herein, the design strategy requirements and its structural optimization processes are discussed. A kinetic friction model of a pneumatic cylinder that considers a piston structure is proposed to improve the force characteristics during dynamic interaction. Furthermore, a quantitative benchmark test is developed to maintain the contact force constant against a load actuator, to evaluate the disturbance resistance under a wide range of target contact force conditions. The concept and performance were validated by experiments comparing the proposed hybrid actuation condition with conventional pneumatic actuation conditions.
ロボットのアクチュエータが接触タスク中のさまざまな動的相互作用に応答することは,アクチュエータの推進力密度とバックドライバビリティの間のトレードオフが存在するため,簡単ではない.ハイブリッド駆動方式は有望であるものの,異種のアクチュエータからの力を合成するための複雑な伝達機構が必要となる.この研究では,従来のハイブリッド駆動方式の基本的な問題点を解決するための新しい「融合ハイブリッドリニアアクチュエータ」の概念を提示した.この設計概念は,エアシリンダとリニアモータの統合された構造を持ち,アクチュエータのコンパクトな筐体内でピストンとリニアモータの可動部の移動空間を共有する.ここでは,設計戦略の要件とその構造最適化のプロセスについて議論する.動的相互作用中の力の特性を向上させるために,ピストン構造を考慮した空気シリンダの動的摩擦モデルを提案した.さらに,ターゲットとなる接触力の広範な条件下での外乱抵抗性を評価するため,負荷アクチュエータに対する接触力を一定に保つための定量的ベンチマークテストを開発した.この概念と性能は,提案されたハイブリッド駆動条件と従来の空気圧駆動条件を比較する実験によって検証された.
| Journal | IEEE/ASME Transactions on Mechatronics |
| Volume | Vol. 28, No. 4 |
| Pages | 2167 - 2177 |
| DOI | 10.1109/TMECH.2023.3237725 |
| URL | https://ieeexplore.ieee.org/document/10084348 |
| Published date | Aug., 2023 |
Back-drivability, direct-drive, electromagnetic actuator, force control, fusion hybrid actuator, hybrid actuation approach, pneumatic actuator, structural design
