Gaze movement operability and sense of spatial presence assessment while operating a robot avatar
操作者と眼球動作が同期するアバターでは,操作性や臨場感が向上するか?
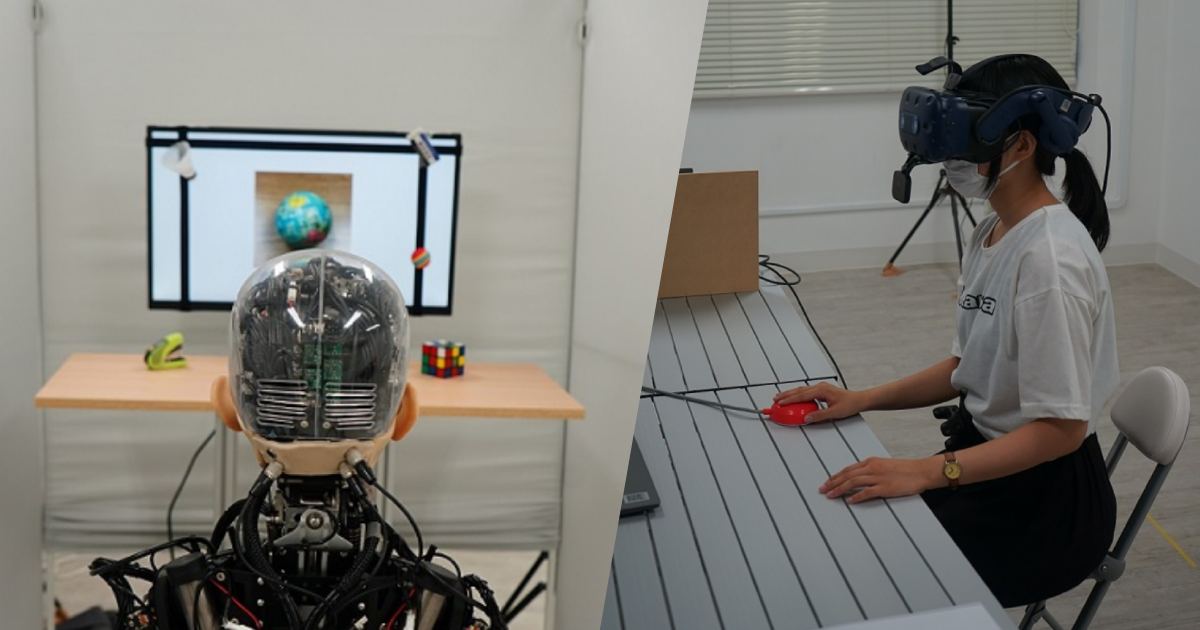
- 頭部の他に眼球の動きも操作者と同期するアンドロイドアバターを用いて実験を行った
- アバターを介して遠隔地のものを見るタスクを行い,パフォーマンス,空間的臨場感,及び作業負荷を評価
- 眼球の動きの同期は,パフォーマンスを向上させ,作業負荷を低減させたが,空間的臨場感を向上させることは無かった
The utilization of teleoperated robots has great potential for expanding the range of human social activities, and there has been much anticipation for this technology in recent years. To use teleoperated robots as human surrogates, it is essential to develop a teleoperation system that provides the operator with a high level of presence. Conventional robot avatars are generally operated by synchronizing the head with the operator. However, eye movements are essential for human gaze, and conventional operation (i.e., head movement synchronization only) may reduce perceived presence. In this study, we used a robot avatar that could move its head and eyeballs. We examined the effects of the synchronization of eye movements with the operator on the operability of the robot and the presence perceived by the operator. We conducted an experiment in which participants performed a task where they looked at an object under two conditions: head or head-eye synchronization between the participant and robot avatar. We investigated the effects of eye movement synchronization on task performance, spatial presence, and workload. The results showed that synchronization of eye movements improved operability and reduced workload; however, it did not improve presence. This study suggests that synchronization of eye movements may make the teleoperation of an avatar robot more comfortable and provides meaningful insights into research approaches for the improving presence of an avatar robot.
遠隔操作ロボットの利用は,人間の社会活動の範囲を広げるために大きな可能性を秘めており,近年,この技術に対する期待が高まっている.遠隔操作ロボットを人間の代理として使用するためには,操作者に高い臨場感を提供する遠隔操作システムの開発が不可欠である.従来のロボットアバターは,一般に操作者の頭の動きと同期させて操作される.しかし,人間の視線には目の動きが不可欠であり,従来の操作(すなわち,頭の動きの同期のみ)は,感じられる臨場感を低下させる可能性がある.この研究では,頭と眼球を動かすことができるロボットアバターを使用し,操作者の目の動きの同期がロボットの操作性と操作者が感じる臨場感にどのような影響を与えるかを調べた.参加者が,物体を見るタスクを行い,参加者とロボットアバターの間で頭のみ,または頭と目の同期の二つの条件下で実験を行った.目の動きの同期がタスクのパフォーマンス,空間的臨場感,および作業負荷にどのような影響を与えるかを調べた.結果は,目の動きの同期が操作性を向上させ,作業負荷を減少させることを示したが,臨場感を向上させることはなかった.この研究は,目の動きの同期がアバターロボットの遠隔操作をより快適にする可能性があり,アバターロボットの臨場感を向上させるための研究アプローチに有意義な洞察の提供する.
| Journal | 2023 IEEE/SICE International Symposium on System Integration (SII) |
| Volume | – |
| Pages | 1 - 7 |
| DOI | 10.1109/SII55687.2023.10039342 |
| URL | https://ieeexplore.ieee.org/document/10039342 |
| Published date | Jan. 19, 2023 |
